
Управление DC-моторчиками с помощью L293D
Я не буду в дальнейшем описывать мелкие детали. О них можно узнать в предыдущих публикациях. Попытаюсь работать более-менее системно, проиллюстрировав каждый шаг (если получится) практическим примером.
1. Н-мост, упрощённая схема:
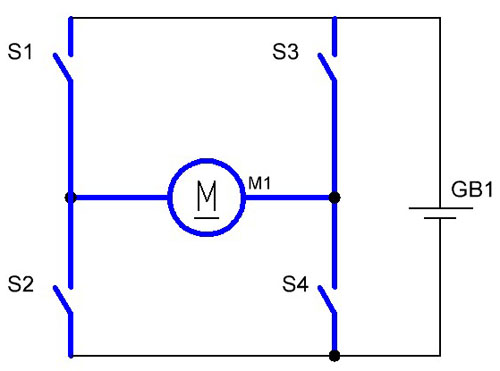
Если замкнуть S1 и S4 – моторчик вращается в одном направлении, если S2 и S3 – в противоположном. Понятно, что такое «управление» практической пользы не имеет, тем более что не следует замыкать S1 и S2, или S3 и S4 – это
 для батарейки! Но сама картинка довольно наглядно поясняет «Почему, собственно, он именуется Н-мост?».
для батарейки! Но сама картинка довольно наглядно поясняет «Почему, собственно, он именуется Н-мост?».Практический пример. Кнопки из набора либо слишком мелковаты, либо слишком велики.
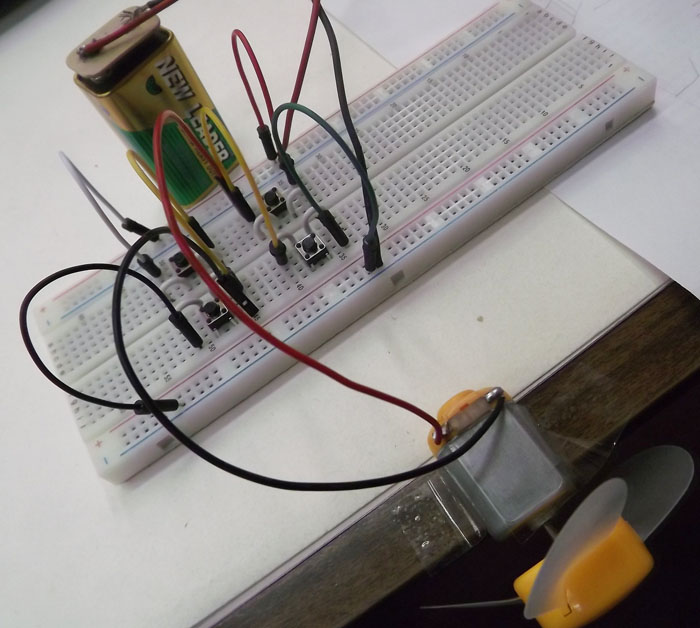
С больши́ми кнопками весьма проблемно смонтировать этот мост на панели, поэтому я использовал мелкие:
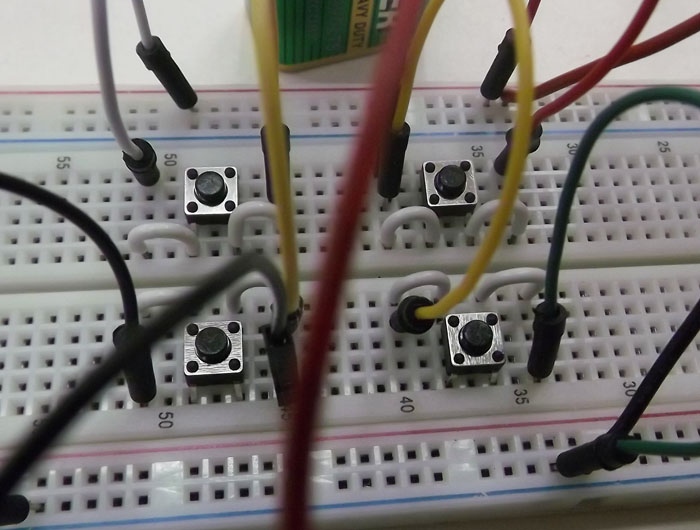
Но нажимать на них надо не моими пальцами. Пинцет выручил. Замыкаю сначала S2 и S3, затем S1 и S4:
Можно, конечно, собрать Н-мост на дискретных элементах (транзисторах) и показать, что он тоже работает. Но создание робота на основе Ардуино – не тот случай, когда требуется столь самоотверженный поступок. Мосты давно уже наведены! Поэтому более извращаться я не намерен.
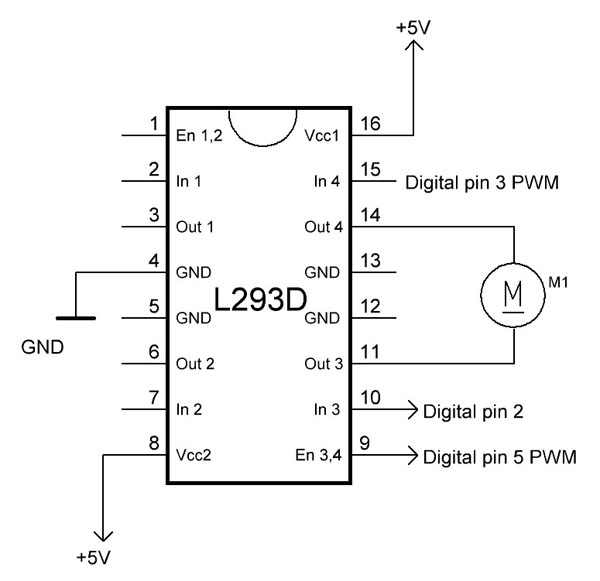
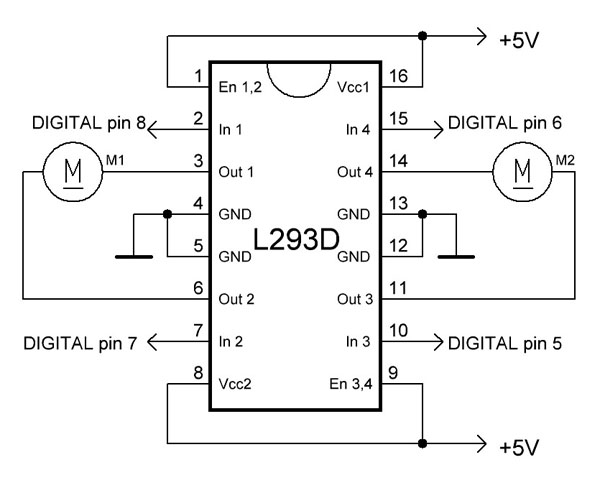
2. L293D представляет собой двойной Н-мост, т.е. служит для управления 2-я моторчиками. Не только, конечно, можно 3-мя и 4-мя, но… читайте DataSheet!
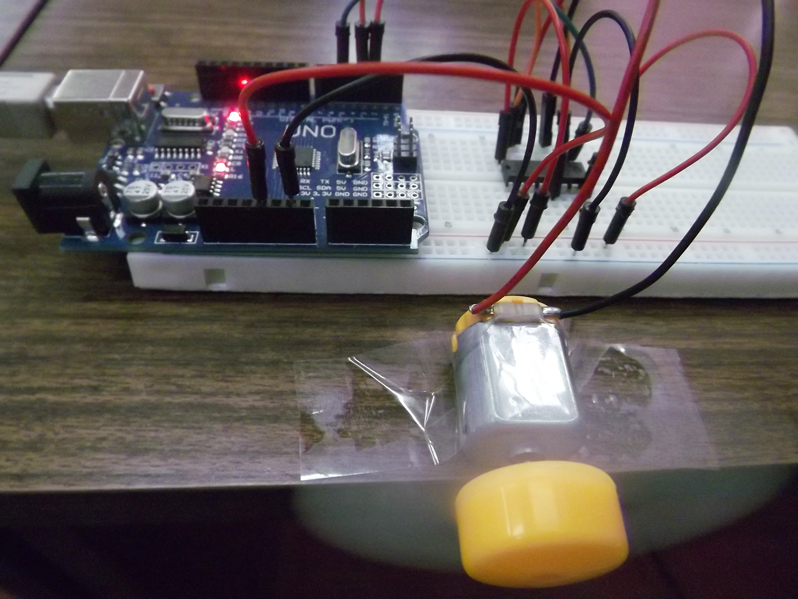
Задействую сначала половину микросхемы для управления одним моторчиком:
Сайт http://robotclass.ru/tutorials/arduino-dc-motor-driver/
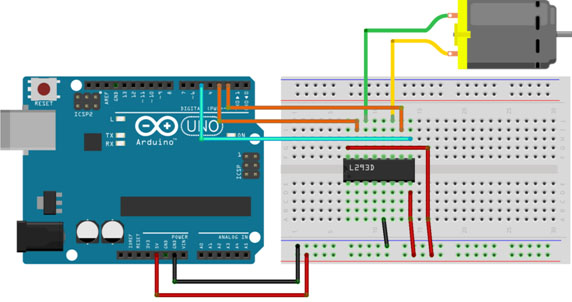
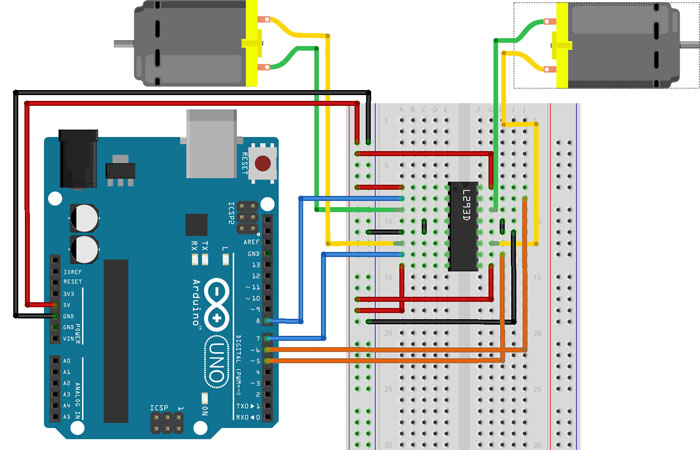
В данном опыте микросхема и моторчик запитаны от Ардуино.
Соединения:
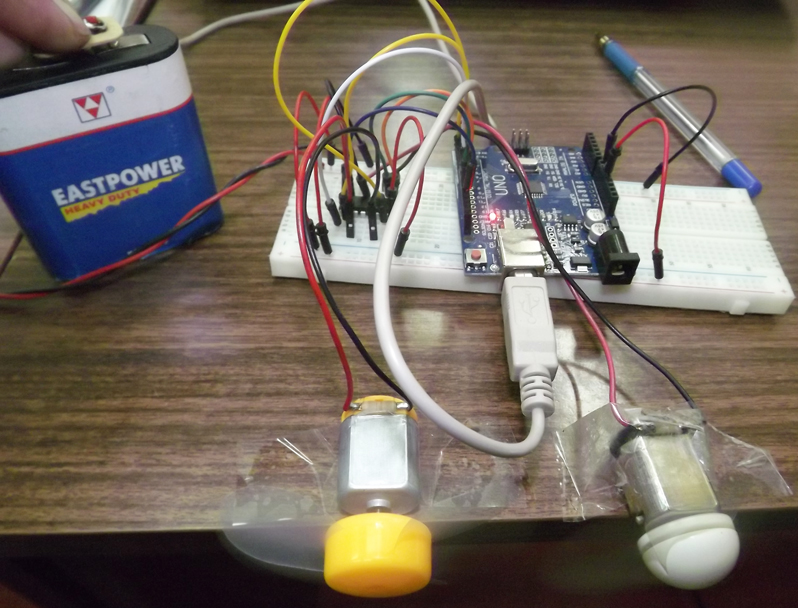
Скетч №1:
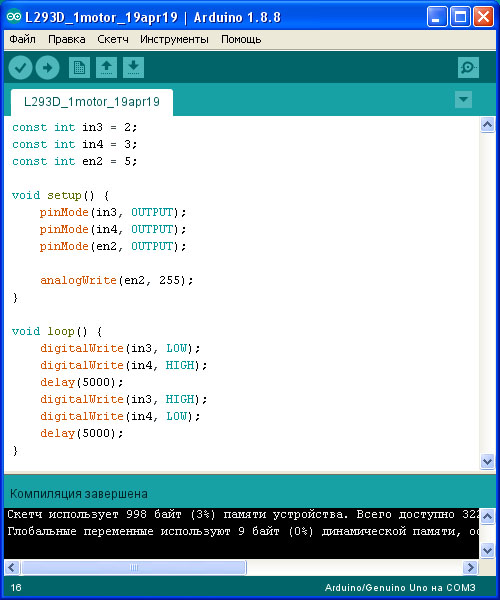
Каждые 5 с моторчик меняет направление вращения. Скорость постоянная.
Скетч №2:
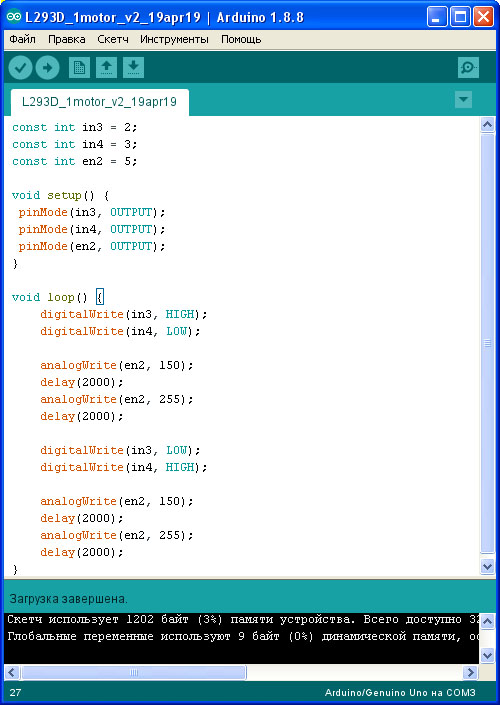
Мотор вращается на пониженных оборотах, затем – на полных, затем – в другую сторону на пониженных, затем на полных и т.д. Интервал – 2 с.
3. Почти то же самое, но моторчик питается от отдельного источника:
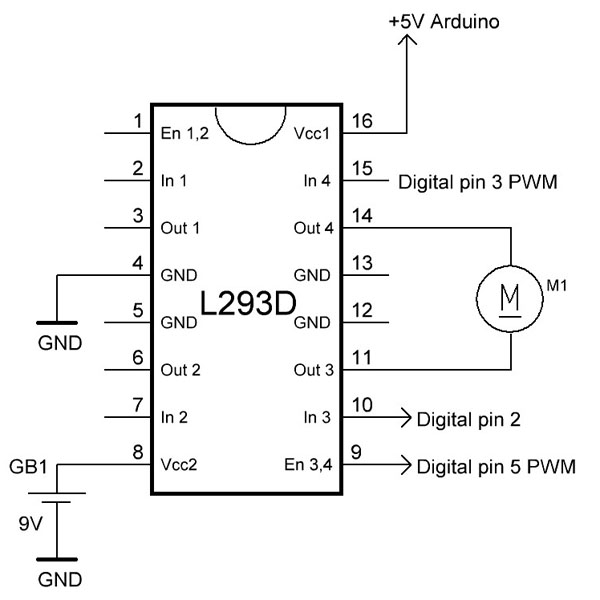
«+» батарейки подключается к 8-й ноге микросхемы, все «-» 4, 5, 12, 13 можно соединить с GND вместе, а можно – любой один из них:
 Скетч тот же.
Скетч тот же.4. L293D и два моторчика
Схема может быть такой:
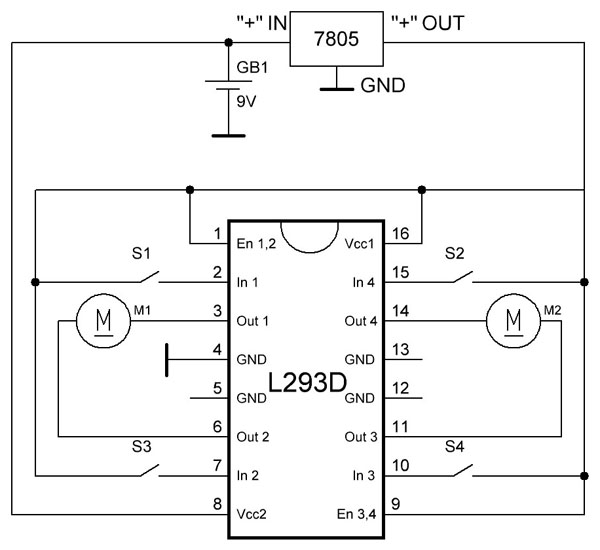
«7805» - это интегральный стабилизатор на 5 В. Но наше будущее устройство НЕ ДОЛЖНО управляться с пульта по проводам! И если на первом этапе оно не будет анализировать ситуацию вокруг, то хотя бы двигаться должно совершенно автономно, под управлением программы. Значит, надо передавать управление Ардуино:
Сайт http://studrobots.ru/dc-motors-arduino/
У меня данная схема нормально не заработала. Даже для двух маленьких DC-моторчиков мощности стабилизатора Arduinoне хватило. Показалось также (касание пальцем), что L293D немного нагрелась!
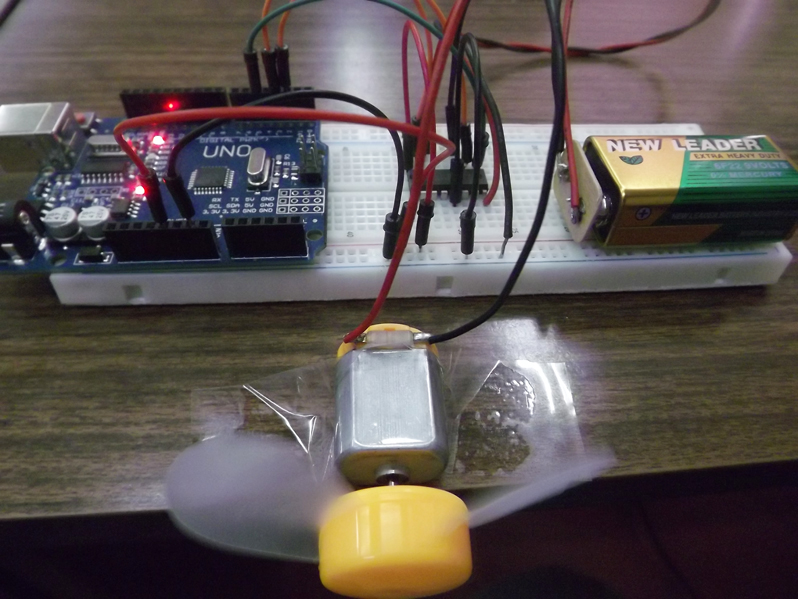
Пришлось снова использовать отдельный источник питания для моторчиков:
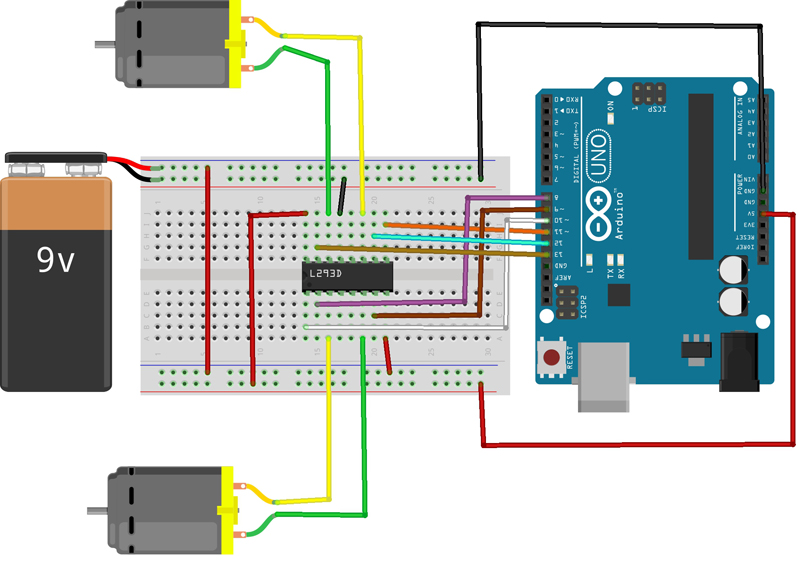
Сайт https://just4electronics.wordpress.com/2015/08/28/learn-make-your-own-cheap-l293d-motor-drivera-complete-guide-for-l293d/
Скетч:
Два моторчика с пропеллерами:
Для них слегка подсевшей «Кроны» также оказалось маловато. Применили более мощную батарейку на 4,5 В.
Вывод: логику и силовые цепи лучше питать от разных источников.
Дальнейшие эксперименты с моторчиками, приклеенными скотчем к столу, считаем нецелесообразными. Пора переходить к более реальному прототипу. Совершенно не хочется делать нечто совершенно неэстетичное типа:
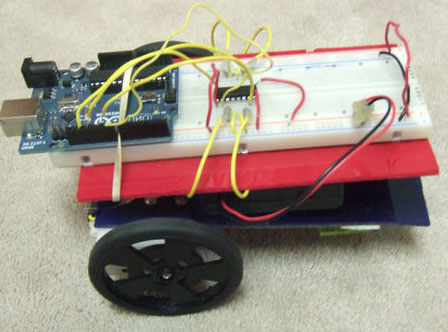
Сайт www.instructables.com
Даже если ОНО и ездит!
На AliExpress ушёл заказ:

SEkorp 20 апреля 2019
НАЗАД на страницу РАДИОардуино
